







-
Введение
-
Глава 1. Аппаратная основа
- Содержание Главы 1
- Подготовка
- Плата Arduino UNO
- Плата управления моторами
- Плата связи с датчиками
- Аппаратная основа на базе набора miniQ
- Аппаратная основа на базе набора Turtle
- Аппаратная основа на базе набора ShieldBot
- Как ученики строили своих miniQ роботов
- Этапы сборки
- Система электропитания робота
- Провода энкодеров и датчиков линии
- Завершение главы 1
-
Глава 2. Начало работ с системой программирования Arduino
- Содержание Главы 2
- Подготовка
- Общие правила организации систем управления
- Входные данные. Датчики
- Обработка данных. Микроконтроллер
- Выходные данные. Исполнительные устройства
- То, что нужно всегда помнить
- Начало работы с системой Arduino
- Загрузка программы-примера “Мигающий огонь”
- Модификация программы “Мигающий огонь”
- Алгоритм программы “Мигающий огонь”
- Завершение Главы 2
-
Глава 3. Управление тяговыми моторами
-
Глава 4. Связь с ультразвуковым датчиком расстояния
- Содержание Главы 4
- Подготовка
- Постановка задач
- Электрическое подключение датчиков расстояния
- Разработка алгоритма
- Исходный текст
- Адреса Echo и Trigger как глобальные переменные
- Отладка и испытание программы
- Руководство пользователя
- Приложение 4.1. Подсказки по сложному алгоритму
- Приложение 4.2. Исходный текст (для упрощённого алгоритма)
- Завершение главы 4
- Факультативная часть главы 4
-
Глава 5. Робот следует за рукой или лидером
- Содержание главы 5
- Подготовка
- Релейный регулятор
- Пропорциональный регулятор
- Утилиты
- UTILIT_OneRangeMeter ()
- UTILIT_Motors_Control ()
- UTILIT_Hand_Follow_Proportional (int _range_needed)
- Два факультативных упражнения после перерыва
- Программа следования за лидером
- Постановка задачи
- Макрос следования за Лидером
- Отладка и испытание программы Programm_modul_5_Leader_Follow.ino
- Если что-то не так
- Исследуем робота
- Важные замечания
- Приложение 5.1 Алгоритм пропорционального регулирования
- Приложение 5.2. Исходный текст утилиты регулятора для следования за рукой
- Приложение 5.3. Документация для макроса и утилит следования за лидером
- MACROS_Leader_Follow (int _distasnce_to_leader)
- UTILIT_LeftRightRangeMeter ()
- UTILIT_Leader_Follow_Proportional (int _range_needed)
- UTILIT_Motors_Control () & UTILIT_Motors_Stop ()
- Завершение главы 5
- Как можно улучшить нашего робота?
-
Глава 6. Структура программного обеспечения
- Содержание главы 6
- Подготовка
- Уровни программного обеспечения
- loop ()
- Задачи
- Макросы
- Утилиты
- Драйверы. Библиотеки. Калькуляторы
- Ввод-вывод
- Глобальные переменные
- Правила обмена информации между уровнями
- Практическое занятие 6.1. Учтём трение в механизмах
- Практическое занятие 6.2. Доворот в сторону лидера умножением
- Практическое занятие 6.3. Доворот в сторону лидера сложением
- Практическое занятие 6.4. Доворот в сторону лидера обнулением
- Практическое занятие 6.5. Делаем калькулятор
- Гонки за лидером
- Послесловие
- Список программ для Ардуино
- Лицензионное соглашение
Система электропитания робота
Сначала посмотрим на принципиальную электрическую схему подключения питания к платам Arduino UNO и Motor Shield. Как Вы помните, питание к остальным устройствам робота подаётся от этих плат. Так что к основной батарее питания надо подключать только платы Arduino UNO и Motor Shield.
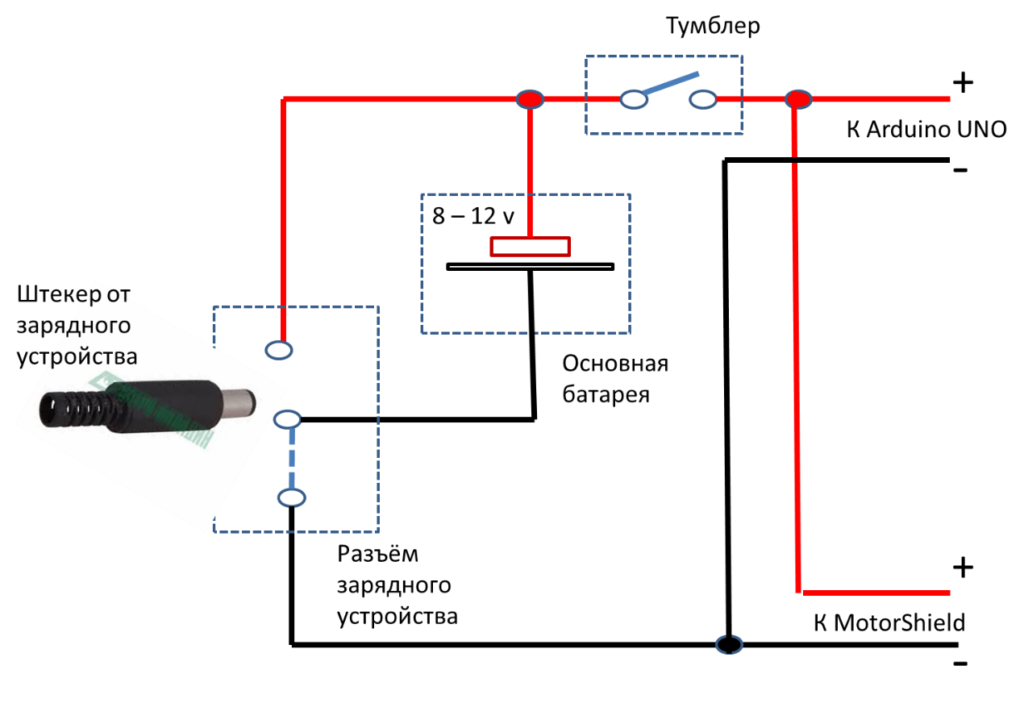
Основная батарея из восьми аккумуляторов в нашем случае выдаёт напряжение от 8 до 12 вольт в зависимости от степени их зарядки. Задача – подать это напряжение двумя парами проводов на разъём ввода питания платы Arduino UNO и два винтовых зажима платы Motor Shield.
На схеме эти пары проводов выходят с правой стороны. Для удобства восприятия, провода на рисунке окрашены. Чёрный провод – это минус, красный – плюс. Плюсовые провода, идущие от плат, подключаются к плюсу батареи через тумблер отключения питания.
В левой части схемы показан разъём зарядного устройства. Он имеет один центральный плюсовой контакт, который просто подключается к плюсу батареи.
Разъём имеет два минусовых вывода, которые замкнуты внутри разъёма, если в него не вставлен штекер зарядного устройства. Если штекер вставлен, то он механически разъединяет эти контакты, а электрически подключается к одному из них.
Минусовые провода от Arduino UNO и Motor Shield подключаются к одному из минусовых выводов разъёма зарядного устройства, а минусовой провод батареи – к другому.
Надо убедиться, что при вставленном штекере минусовой провод зарядного устройства соединён только с минусовым проводом батареи. А минусовые провода плат от батареи отсоединены.
Таким образом, если штекер зарядного устройства отсутствует, то минус батареи прямо подключён к минусовым проводам плат. А если штекер вставлен в разъём, то батарея оказывается подключённой к зарядному устройству, а остальная электроника робота – отключённой.
Это делается для того, чтобы можно было использовать зарядное устройство с повышенным напряжением и не бояться сжечь электронику робота во время зарядки батареи, даже если Вы забудете отключить питание тумблером.
Электрическая принципиальная схема показывает только, как надо соединять проводами выводы устройств – батареи питания, тумблера и разъёма зарядного устройства. Как в реальной жизни будут выглядеть эти провода, зависит от особенностей Вашей конструкции.
Необходимо обмотать изоляционной лентой контакты приборов с оголёнными частями проводов.
Для выполнения выше перечисленных работ Вам потребуется умение паять. Если Вы пока паять не умеете, то в интернете можно разыскать большое количество уроков, обучающих этому ремеслу. Или обратитесь к знакомому, который сможет Вам помочь.