







-
Введение
-
Глава 1. Аппаратная основа
- Содержание Главы 1
- Подготовка
- Плата Arduino UNO
- Плата управления моторами
- Плата связи с датчиками
- Аппаратная основа на базе набора miniQ
- Аппаратная основа на базе набора Turtle
- Аппаратная основа на базе набора ShieldBot
- Как ученики строили своих miniQ роботов
- Этапы сборки
- Система электропитания робота
- Провода энкодеров и датчиков линии
- Завершение главы 1
-
Глава 2. Начало работ с системой программирования Arduino
- Содержание Главы 2
- Подготовка
- Общие правила организации систем управления
- Входные данные. Датчики
- Обработка данных. Микроконтроллер
- Выходные данные. Исполнительные устройства
- То, что нужно всегда помнить
- Начало работы с системой Arduino
- Загрузка программы-примера “Мигающий огонь”
- Модификация программы “Мигающий огонь”
- Алгоритм программы “Мигающий огонь”
- Завершение Главы 2
-
Глава 3. Управление тяговыми моторами
-
Глава 4. Связь с ультразвуковым датчиком расстояния
- Содержание Главы 4
- Подготовка
- Постановка задач
- Электрическое подключение датчиков расстояния
- Разработка алгоритма
- Исходный текст
- Адреса Echo и Trigger как глобальные переменные
- Отладка и испытание программы
- Руководство пользователя
- Приложение 4.1. Подсказки по сложному алгоритму
- Приложение 4.2. Исходный текст (для упрощённого алгоритма)
- Завершение главы 4
- Факультативная часть главы 4
-
Глава 5. Робот следует за рукой или лидером
- Содержание главы 5
- Подготовка
- Релейный регулятор
- Пропорциональный регулятор
- Утилиты
- UTILIT_OneRangeMeter ()
- UTILIT_Motors_Control ()
- UTILIT_Hand_Follow_Proportional (int _range_needed)
- Два факультативных упражнения после перерыва
- Программа следования за лидером
- Постановка задачи
- Макрос следования за Лидером
- Отладка и испытание программы Programm_modul_5_Leader_Follow.ino
- Если что-то не так
- Исследуем робота
- Важные замечания
- Приложение 5.1 Алгоритм пропорционального регулирования
- Приложение 5.2. Исходный текст утилиты регулятора для следования за рукой
- Приложение 5.3. Документация для макроса и утилит следования за лидером
- MACROS_Leader_Follow (int _distasnce_to_leader)
- UTILIT_LeftRightRangeMeter ()
- UTILIT_Leader_Follow_Proportional (int _range_needed)
- UTILIT_Motors_Control () & UTILIT_Motors_Stop ()
- Завершение главы 5
- Как можно улучшить нашего робота?
-
Глава 6. Структура программного обеспечения
- Содержание главы 6
- Подготовка
- Уровни программного обеспечения
- loop ()
- Задачи
- Макросы
- Утилиты
- Драйверы. Библиотеки. Калькуляторы
- Ввод-вывод
- Глобальные переменные
- Правила обмена информации между уровнями
- Практическое занятие 6.1. Учтём трение в механизмах
- Практическое занятие 6.2. Доворот в сторону лидера умножением
- Практическое занятие 6.3. Доворот в сторону лидера сложением
- Практическое занятие 6.4. Доворот в сторону лидера обнулением
- Практическое занятие 6.5. Делаем калькулятор
- Гонки за лидером
- Послесловие
- Список программ для Ардуино
- Лицензионное соглашение
Факультативная часть Главы 3
Механическое сопротивления вращению колёс
Внимательный читатель мог заметить локальную переменную, которая в исходном тексте драйвера управления моторами декларирована, но не используется:
int _motor_speed_minimum = 0;
Она нужна для учёта механических сопротивлений, которые возникают в приводах. Сначала немного поговорим о физической сути этого сопротивления.
Подавая электрическое напряжение на обмотки электродвигателя, мы создаём электрический ток в их проводах. Электродвигатель устроен так, что провода обмотки ротора (то, что вращается в двигателе) находятся в магнитном поле статора (то, что в двигателе неподвижно).
На уроках физики Вам рассказывали о взаимодействии электрического тока и магнитного поля и показывали опыты, на которых проводник с током, помещённый в магнитное поле начинает двигаться. Это означает, что на него начинает действовать сила. В конструкции электродвигателя эта сила заставляет вращаться ротор.
К оси ротора механически подсоединён редуктор, уменьшающий скорость вращения. А на оси редуктора находится колесо.
Робот стоит на колёсах и всем своим весом прижимает их к полу. Если колесо начинает вращаться, то между ним и полом возникает сила трения, которая толкает колесо, а с ним и робота вперёд или назад в зависимости от того, куда колесо закручено мотором. Колесо как бы отталкивается от пола, двигая робот. В этом случае сила трения колеса об пол – наш помощник, так как помогает двигать робот.
Но в механической системе – обмотка ротора двигателя + шестерёнки редуктора + колесо, прижатое к полу, действуют и другие силы трения, которые препятствуют вращению. Двигатель должен их преодолевать, чтобы робот, стоящий на полу мог двигаться.
Сила, которая возникает от взаимодействия электрического тока в обмотках ротора электродвигателя и магнитного поля его статора зависит от величины тока, поданного в обмотку. Чем больше ток, тем больше сила.
С точки зрения программиста и его программы сила тока – это значения чисел, которые мы передаём в драйвер –
void DRIVER_Motor_Shield_Control (int _left_power, int _right_power)
В принципе эти числа могут быть любыми в диапазоне от минус бесконечности до плюс бесконечности. Но наш драйвер устроен так, чтобы отсекать все отрицательные числа и числа, модуль которых больше чем _motor_speed_maximum. Таким образом, драйвер защищает моторы от перегрева и разрушения.
А что произойдёт, если числа будут маленькими?
Попробуйте сами. Поставьте робот колёсами вверх, чтобы они могли вращаться без контакта с полом. В функции loop () вызовите наш драйвер и дайте ему маленькие числа.
Например DRIVER_Motor_Shield_Control (1, 1);
Откомпилируйте текст и загрузите программу. Скорее всего, колёса останутся неподвижными.
Почему? Ведь мы же дали в моторы ток!
Да, электрический ток мы дали, но он маленький. Сила его взаимодействия с магнитным полем статора слаба и не может преодолеть силы трения в шестерёнках редуктора. Кстати, в подшипниках самого двигателя тоже есть небольшая сила трения.
Попробуйте последовательно увеличивать числа, передаваемые в драйвер и заметить, при каких значениях колёса начнут вращаться. Это и будет то минимальное число, которое надо подать в драйвер при вызове, если мы хотим, чтобы колёса вращались. Не забывайте каждый раз перекомпилироваить программу и загружать её в робота.
Кстати, может быть для левого и правого колеса эти числа будут разными. Возьмите в качестве минимального для всего робота большее из них.
Вопрос к Вам – почему минимальные числа могут быть разными для разных колёс?
Но это ещё не всё. Если Вы подадите в моторы это минимальное число, включите питание и поставьте робот на пол, то, скорее всего, он не поедет. Робот своим весом придавит колесо к полу, реакция колеса добавит трения в подшипниках и сопротивление вращению увеличится. То есть минимальное число надо увеличить.
Сделайте несколько попыток, постепенно увеличивая числа, подаваемые в драйвер. При каком-то числе робот начнёт медленно двигаться. Это и будет Ваше значение локальной переменной _motor_speed_minimum.
Правда, лучше его увеличить на 3-7%. Мы пишем универсальную программу, применимую ко всем роботам. А сила сопротивления вращению штука очень индивидуальная и немного меняется от экземпляра к экземпляру. Так что лучше заложить небольшой запас по мощности.
Теперь поговорим о том, что с этим всем делать и как нужно изменить драйвер управления моторами, чтобы учитывать силу сопротивления.
Учёт сопротивления вращению колёс
Постановка задачи. Наш новый драйвер должен делать следующее –
- Если модуль полученной мощности мотора превышает
_motor_speed_maximum, то в мотор надо подать_motor_speed_maximum. - Если модуль полученной мощности равен нулю, то в мотор надо подать ноль.
- Если модуль полученной мощности больше нуля и меньше
_motor_speed_minimum, то в мотор надо подать_motor_speed_minimum. - Если модуль полученной мощности больше
_motor_speed_minimumи меньше_motor_speed_maximum, то в мотор надо подать именно эту мощность.
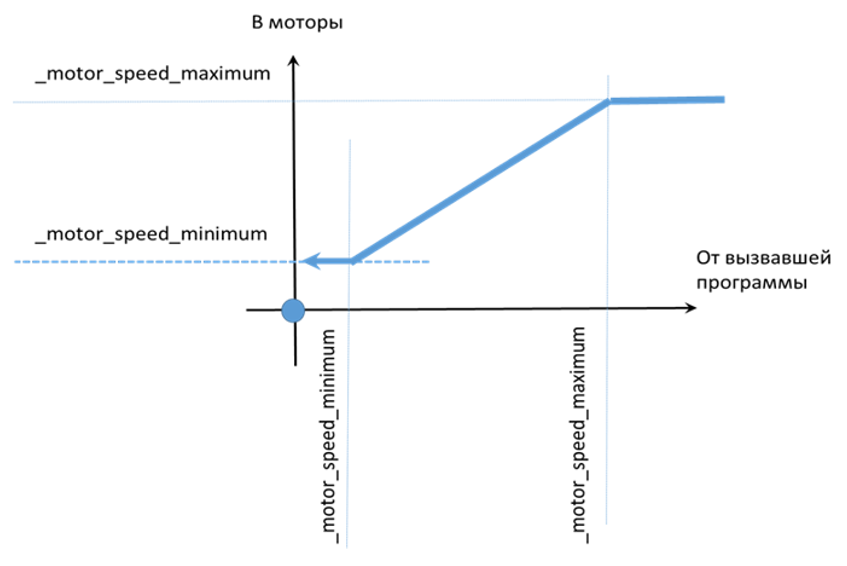
На рисунке выше отображено то, что сказано в пунктах 1-4. Стрелка и жирная точка на графике сообщают нам, что для входного сигнала, равного нулю у нас есть особое значение выходного сигнала – ноль.
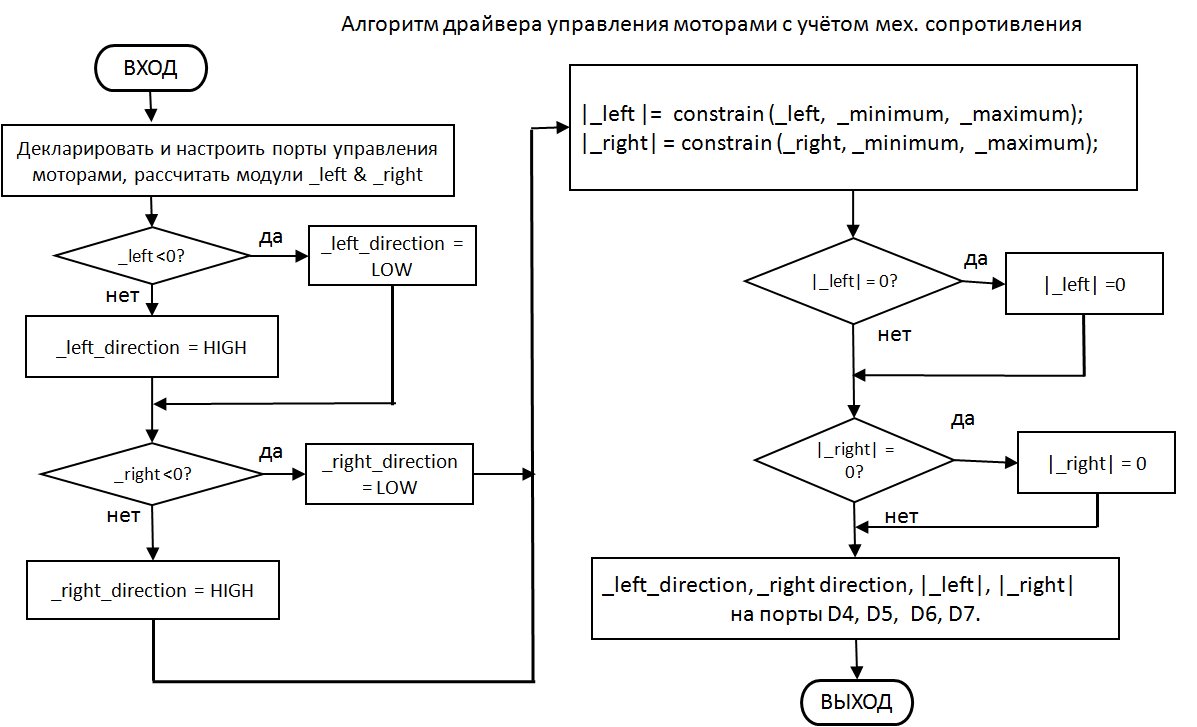
Первая часть алгоритма идентична старому – надо декларировать и настроить порты управления двигателями, рассчитать модули мощностей левого и правого моторов, принятые от вызвавшей программы.
Затем загрузить локальные переменные, определяющие направления вращения соответствующим образом. Дальше начинаются различия.
Возможно, Вы уже знаете про встроенную функцию constrain. Если нет, самое время о ней поговорить. Эта функция берёт значение заданной Вами переменной и сравнивает её с заданными Вами ограничениями.
Если значение переменной находится между ними, то она остаётся как есть и функция возвращает, то значение, которое было передано ей. Если значение меньше заданного минимального, то функция возвращает минимальное. Если больше максимального, то возвращается максимальное.
То есть мы можем записать в нашей программе следующую строчку –
_left_power_modul = constrain (_left_power_modul, _motor_speed_minimum, _motor_speed_maximum);
После отработки этой строчки в переменной _left_power_modul окажется –
_motor_speed_minimum, если до вызова функции переменная_left_power_modulбыла меньше, чем_motor_speed_minimum
_motor_speed_maximum, если до вызова функции переменная_left_power_modulбыла больше, чем_motor_speed_maximum
_left_power_modul, если до вызова функции переменная_left_power_modulнаходилась в промежутке между_motor_speed_minimumи_motor_speed_maximum
Эта операция делается и для левого и для правого моторов.
После этого необходимо проверить, равны ли входные параметры нашего драйвера нулю.
И если левый или правый мотор должен остановиться, то записать в модуль мощности соответствующего мотора ноль.
Исходный текст
Вот почти и всё. Осталось написать сам исходный текст драйвера, и руководство пользователя. Исходный текст для сравнения с Вашим есть в Ардуино файле –
Programm_modul_3_Motor_Shield_zero_power.ino
Руководство пользователя
| ОПИСАНИЕ
Производит загрузку четырёх портов вывода платы Arduino UNO сигналами, обеспечивающими вращение колёс робота через плату управления MotorShield в соответствии с электрической разводкой этой платы. Задействуются следующие контакты платы ARDUINO UNO – 4, 5, 6 и 7. Использование этих контактов для других устройств запрещено. СИНТАКСИС
При превышении модуля |
Немного об отладке нового драйвера управления моторами. В принципе процедура такая же, как и для драйвера DRIVER_Motor_Shield_Control (int _left power, int _right_power).
Но есть небольшие добавления:
- Необходимо убедится, что при подаче в какой-либо мотор нуля, он будет неподвижен.
- Необходимо убедиться, что при подаче любого числа большего нуля, но меньшего
_motor_speed_minimum, мотор будет крутиться со скоростью_motor_speed_minimum.
Вы уже догадались, как это сделать.
Так же как это делалось при наладке первого драйвера в основном тексте этой главы.
И ещё одно замечание. Если Вы подбирали _motor_speed_minimum на ровном твёрдом полу, то на мягкой поверхности (например, на ковре или траве) робот, скорее всего не поедет. Это потому, что сопротивление движению у жёсткого пола меньше всего.
Так что нам придётся смириться с тем, что наши роботы могут двигаться только по ровному жёсткому полу. Для ковров, травы или земли надо менять конструкцию транспортной тележки – увеличивать диаметр колеса, ставить более мощные моторы и основную батарею.
Мы пока этого делать не будем. Наша задача – научится правилам проектирования и настройки роботов. А для этого нашего робота вполне достаточно.
Теперь действительно всё про драйвер управления моторами для платы MotorShield или её функциональных аналогов.
Драйвер, для ShieldBot
Следует отметить, что всё написанное ниже пока ещё не проверялось авторами “вживую”. Информация взята из источников в Интернете и дополнена в соответствии с нашими собственными представлениями.
Поэтому если Вы решите использовать ShieldBot, то рассматривайте нижеприведённый текст как теоретическое описание, которое необходимо проверить на практике.
Распределение портов ShieldBot отличается от распределения, принятого в роботах, построенных в нашем кружке на основе платы MotorShield.
Отличия следующие:
- Аналоговые порты А0-А5 подключены к шести датчикам линии. Нам эти порты потребуются для подключения датчиков расстояния. К счастью на плате ShieldBot есть микропереключатели, которые позволяют отключить датчики линии и освободить порты А0-А5 для других дел.
- Для управления моторами необходимо использовать шесть цифровых портов (5, 6, 7, 8, 9 и 10), а не четыре как в MotorShield (4, 5, 6, 7 и 8). Почему так сделано – точно не знаем. Возможно потому, что на плате ShieldBot рядом с моторами находятся светодиоды, показывающие своим свечением актуальное направление вращения моторов. И два порта задействованы для управления ими. При первоначальной настройке этих портов необходимо все шесть настроить на ВЫВОД.
- Порт 6 задаёт скорость вращения Правого мотора. На него необходимо подавать широтно-модулированный сигнал командой
analogWrite (address, value). Так же как и в случае MotorShield. Ограничения на значенияvalueтакие же. - Порт 9 – тоже, что и порт 6, но для Левого мотора.
- Порты 5 и 7 определяют направление вращения Правого мотора.
- Вперёд –
digitalWrite (5, HIGH) и digitalWrite (7, LOW) - Назад –
digitalWrite (5, LOW) и digitalWrite (7, HIGH)
- Вперёд –
- Порты 8 и 10 определяют направление вращения Правого мотора.
- Вперёд –
digitalWrite (8, HIGH) и digitalWrite (9, LOW) - Назад –
digitalWrite (8, LOW) и digitalWrite (9, HIGH)
- Вперёд –
- Порт 6 задаёт скорость вращения Правого мотора. На него необходимо подавать широтно-модулированный сигнал командой
Исходный текст драйвера void DRIVER_Motors_ShieldBot (int _left, int _right) – это попытка авторов написать драйвер управления моторами для ShiedBot.
Но необходимо отметить, что настоящего робота на базе ShieldBot у нас не было, поэтому реальную настройку и отладку этого драйвера мы пока не делали.
В случае, если Вы используете плату ShieldBot вместо MotorShield нужно заменить драйвер
void DRIVER_Motor_Shield_Control (int _left_power, int _right_power)
на драйвер void DRIVER_Motors_ShieldBot (int _left, int _right) в тексте программы.
Только надо иметь в виду, что:
- Драйвер
void DRIVER_Motors_ShieldBot (int _left, int _right)использует другие контакты портов платы Arduino UNO. - Так же как
DRIVER_Motor_Shield_Control_zero_power (int _left_power, int _right_power)уже имеет встроенное ограничение учитывающее трение в редукторах.
Постановка задачи
То же, что и для драйвера DRIVER_Motor_Shield_Control_zero_power (int _left_power, int _right_power)
Алгоритм
То же, что и для драйвера DRIVER_Motor_Shield_Control_zero_power (int _left_power, int _right_power)
Исходный текст
В этом тексте уже учтены ограничения мощности с обеих сторон (сверху – 250 и снизу – 40)
//*********************************************************
void DRIVER_Motors_ShieldBot (int _left_power, int _right_power)
{
// Декларирование и назначение портов вывода
int Port_POWER_LEFT_MOTOR = 9;// Порт мощности на левый двигатель
int Port_POWER_RIGHT_MOTOR = 6;// Порт мощности на правый двигатель
int Port_DIRECTION_1_LEFT_MOTOR = 8;// Порт направления вращения левого_1
int Port_DIRECTION_2_LEFT_MOTOR = 10;// Порт направления вращения левого¬_2
int Port_DIRECTION_1_RIGHT_MOTOR = 5;// Порт направления вращения правого_1
int Port_DIRECTION_2_RIGHT_MOTOR = 7;// Порт направления вращения правого_2
// Декларирование и первоначальное назначение внутренних переменных управления двигателем
int _left_direction_1 = HIGH;// направление вращения левого двигателя вперёд
int _left_direction_2 =LOW ;//
int _right_direction_1 = HIGH;// направление вращения правого двигателя вперёд
int _right_direction_2 = LOW;//
int _left_power_modul = 0;// мощность в левый двигатель
int _right_power_modul = 0;// мощность в правый двигатель
// Декларирование и назначение ограничителей
int _motor_speed_minimum = 40;
int _motor_speed_maximum = 250;
// НАЧАЛО ИСПОЛНЯЕМЫХ ОПЕРАТОРОВ
// Настройка режимов портов вывода
pinMode (Port_POWER_LEFT_MOTOR, OUTPUT);
pinMode (Port_POWER_RIGHT_MOTOR, OUTPUT);
pinMode (Port_DIRECTION_1_LEFT_MOTOR, OUTPUT);
pinMode (Port_DIRECTION_2_LEFT_MOTOR, OUTPUT);
pinMode (Port_DIRECTION_1_RIGHT_MOTOR, OUTPUT);
pinMode (Port_DIRECTION_2_RIGHT_MOTOR, OUTPUT);
// Вычисление модулей int _left_power, int _right_power
if (_left_power < 0) {_left_power_modul = 0 - _left_power;} else {_left_power_modul = _left_power;}
if (_right_power < 0) {_right_power_modul = 0 - _right_power;} else {_right_power_modul = _right_power;}
// Вычисление направления вращения двигателей
if (_left_power >= 0) {_left_direction_1 = HIGH; _left_direction_2 = LOW;}
else {_left_direction_1 = LOW; _left_direction_2 = HIGH;}
if (_right_power >= 0) { _right_direction_1 = HIGH; _right_direction_2 = LOW;}
else { _right_direction_1 = LOW; _right_direction_2 = HIGH;}
// Учёт ограничений на значение, подаваемое в моторы
_left_power_modul = constrain (_left_power_modul, _motor_speed_minimum, _motor_speed_maximum);
_right_power_modul = constrain (_right_power_modul, _motor_speed_minimum, _motor_speed_maximum);
analogWrite (Port_POWER_LEFT_MOTOR, _left_power_modul);
analogWrite (Port_POWER_RIGHT_MOTOR, _right_power_modul);
digitalWrite (Port_DIRECTION_1_LEFT_MOTOR, _left_direction_1);
digitalWrite (Port_DIRECTION_2_LEFT_MOTOR, _left_direction_2);
digitalWrite (Port_DIRECTION_1_RIGHT_MOTOR, _right_direction_1);
digitalWrite (Port_DIRECTION_2_RIGHT_MOTOR, _right_direction_2);
}
//*********************************************************
Руководство пользователя
| ОПИСАНИЕ
При вызове драйвер СИНТАКСИС
|